



 Serwis dronów
Serwis dronów Wypożyczalnia
Wypożyczalnia Pewność
Pewność  Zaufanie
Zaufanie Lokalny magazyn i salon
Lokalny magazyn i salon Gwarancja
Gwarancja
Dzięki fotogrametrii dronem szybciej pozyskasz dane z terenu oraz obniżysz koszty operacyjne.




Ładunek użytkowy Zenmuse L2 łączy w sobie technologię LiDAR, autorski system IMU o wysokiej dokładności oraz kamerę mapującą 4/3 CMOS RGB, zapewniając jeszcze bardziej precyzyjne, wydajne i niezawodne pozyskiwanie danych geoprzestrzennych

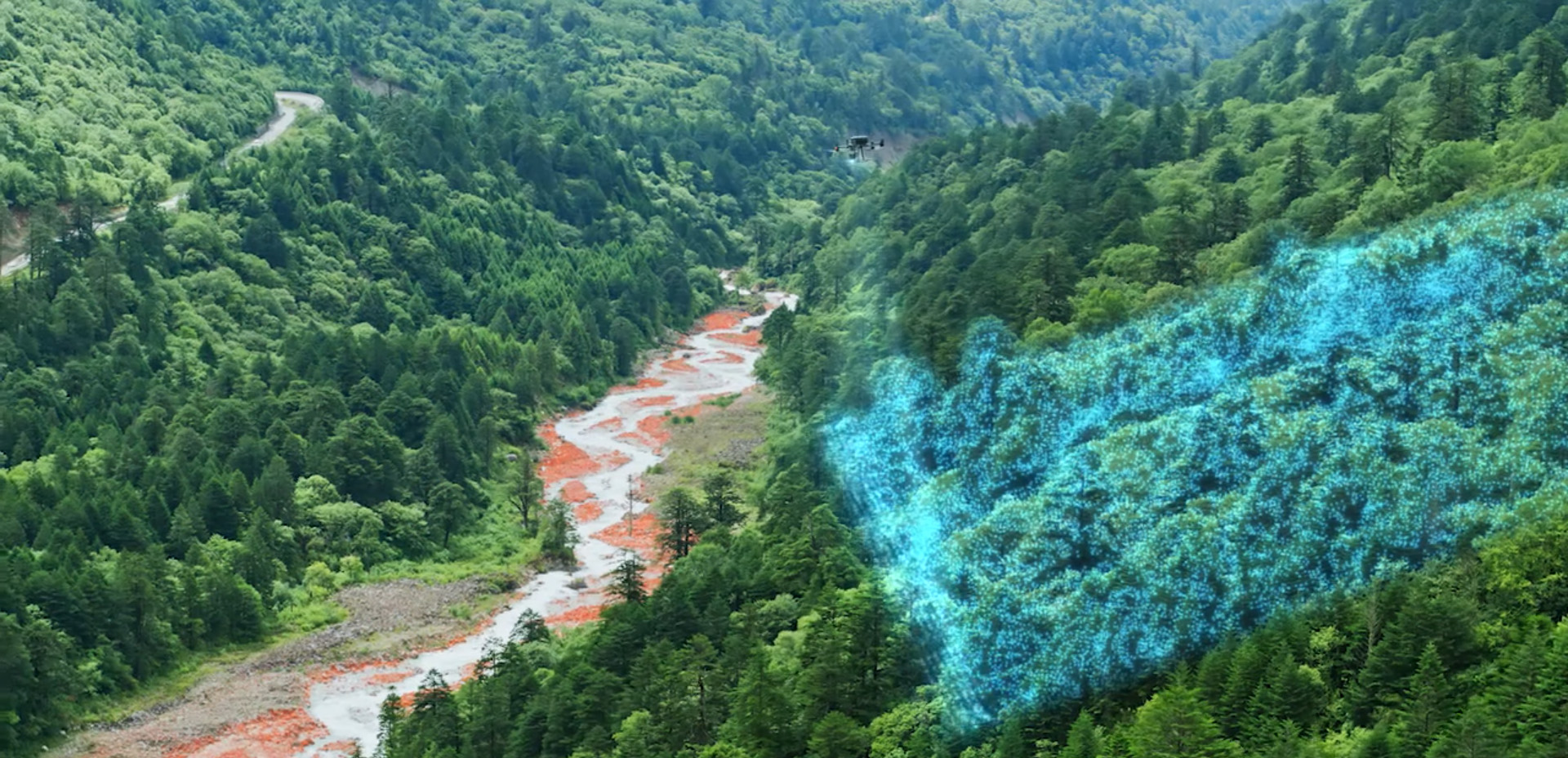
Wspierany przez zaawansowaną technologię, ładunek użytkowy Zenmuse L2 pozwala na precyzyjne skanowanie złożonych obiektów w większym obszarze i pozwalając na jeszcze szybsze tworzenie chmur punktów.
Dzięki połączeniu GNSS i autorskiego modułu IMU, pomiary osiągają dokładność 4 cm w pionie i 5 cm w poziomie.
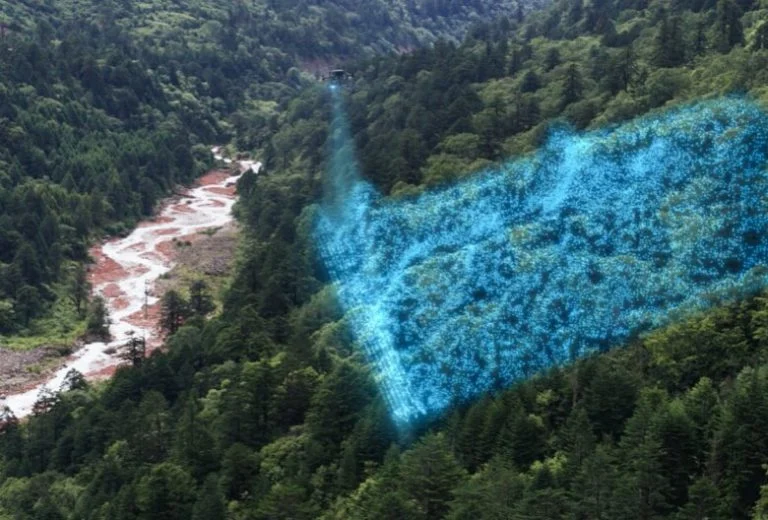
Gotowość do pracy natychmiast po włączeniu. Zbieranie danych geo-przestrzennych i RGB z obszaru o powierzchni 2,5 km2 podczas jednego lotu.

W połączeniu z dronem DJI Matrice 350 RTK i oprogramowaniem DJI Terra, skaner LiDAR Zenmuse L2 oferuje gotowe i łatwe w użyciu rozwiązanie.

Zenmuse L2 może wykrywać pomiary z odległości 250 metrów przy współczynniku odbicia 10% i jasności 100 klx oraz do 450 metrów przy współczynniku odbicia 50% i jasności 0 klx.

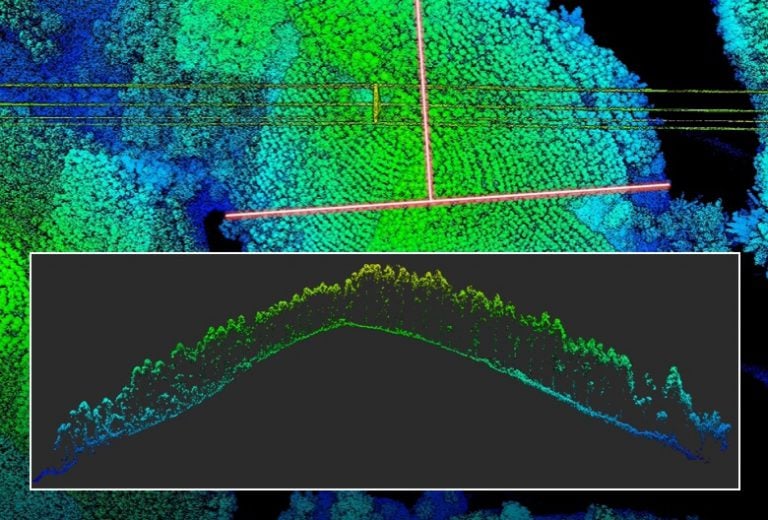
Dzięki zmniejszonemu rozmiarowi plamki 4×12 cm @100 m, czyli tylko jedna piąta tego co w Zenmuse L1, Zenmuse L2 nie tylko wykrywa mniejsze obiekty z większą ilością szczegółów, ale może również przenikać przez bardziej gęstą roślinność, generując dokładniejsze cyfrowe modele wysokościowe (DEM).,
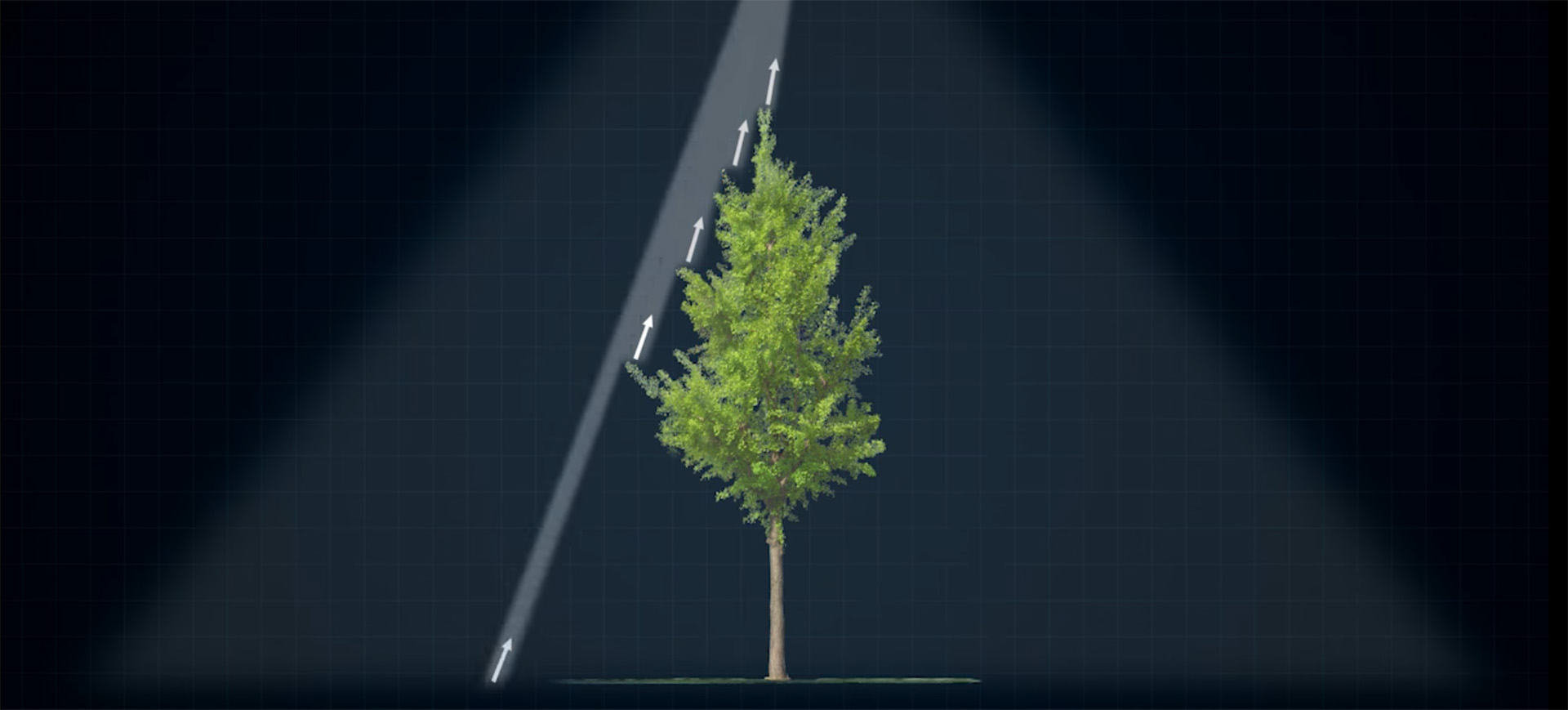
W obszarach gęsto porośniętych roślinnością, Zenmuse L2 może uchwycić więcej punktów naziemnych znajdujących się pod liśćmi.
Zarówno w trybie skanowania liniowego (repetitive) jak i bez powtórzeń (non-repetitive), Zenmuse L2 może osiągnąć maksymalną szybkość przetwarzania chmury punktów wynoszącą 240 000 punktów na sekundę.
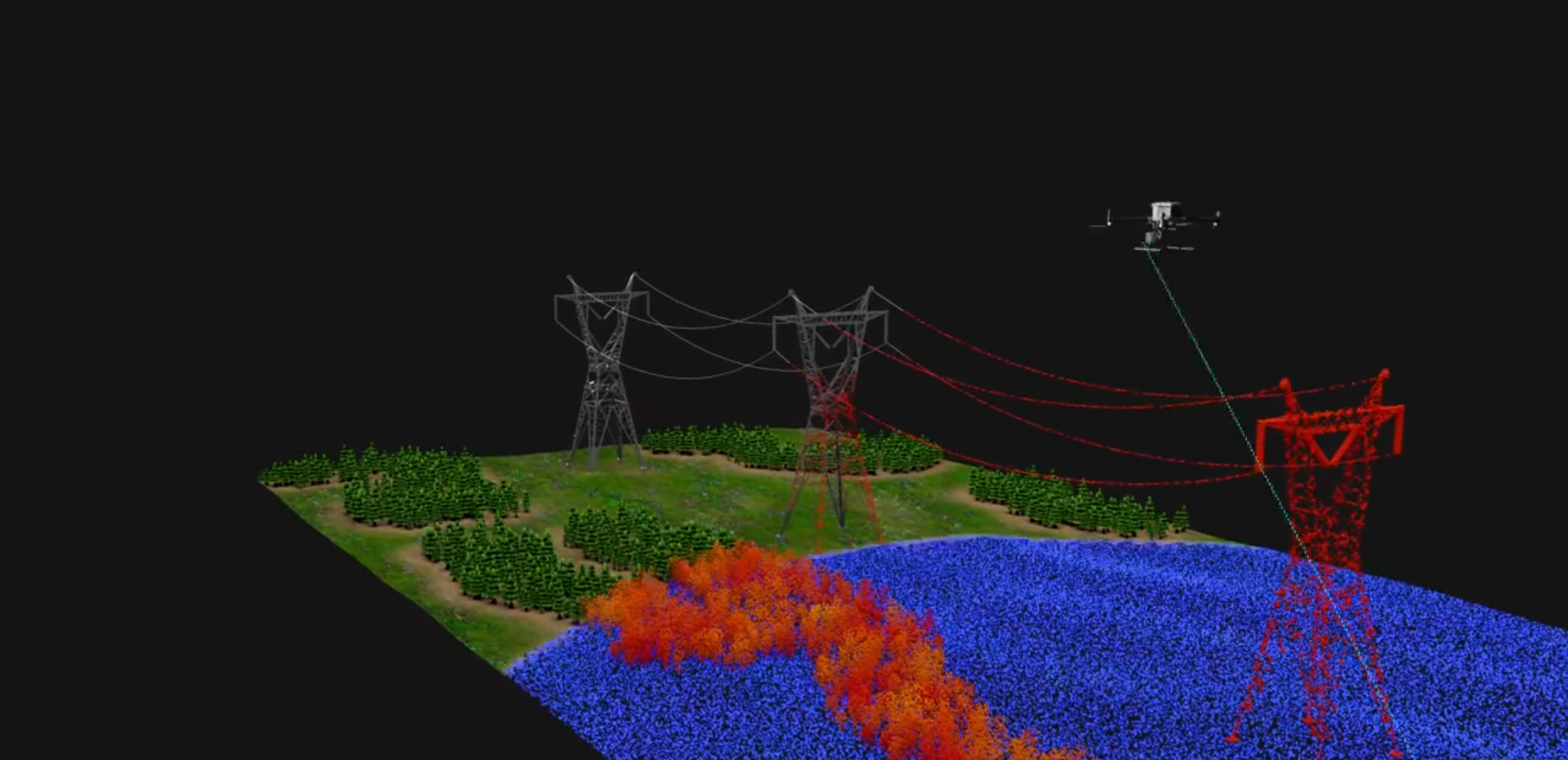
W trybie skanowania liniowego (repetitive scanning) można uzyskać bardziej jednolite i dokładne chmury punktów, spełniając jednocześnie wymagania dotyczące precyzyjnego mapowania. Tryb skanowania bez powtórzeń (non-repetitive scanning) oferuje głębszą penetrację dla uzyskania większej ilości informacji strukturalnych, dzięki czemu nadaje się do inspekcji linii energetycznych, pomiarów leśnych i innych scenariuszy.
Zaawansowany system IMU o wysokiej dokładności, w połączeniu z dronem wyposażonym systemem pozycjonowania RTK, zapewniają Zenmuse L2 dostęp do bardzo dokładnych informacji o pozycji bezwzględnej, prędkości i położeniu.

Wydajność systemu IMU została znacznie zwiększona i jest on gotowy do użycia od razu po włączeniu zasilana. Dron jest gotowy do rozpoczęcia zadań natychmiast po ustawieniu RTK w statusie FIX, zapewniając zoptymalizowane działanie w terenie.

Rozmiar piksela został zwiększony do 3,3 μm, a efektywna liczba pikseli sięga teraz 20 MP, co skutkuje znaczną poprawą ogólnego obrazowania, a także większymi szczegółami chmury punktów w rzeczywistych kolorach. Gdy tworzenie chmury punktów nie jest wymagane, kamera RGB może nadal robić zdjęcia i nagrywać filmy lub zbierać obrazy do mapowania w świetle widzialnym.
| OGÓLNE | |
|---|---|
| Nazwa produktu | Zenmuse L2 |
| Wymiary | 155×128×176 mm |
| Masa | 905±5 g |
| Moc | 28 W (nominalna) 58 W (maksymalna) |
| Stopień ochrony IP | IP54 |
| Kompatybilne drony | Matrice 300 RTK (wymaga aparatury DJI RC Plus) Matrice 350 RTK |
| Temperatura przechowywania | -20° do 60°C |
| PARAMETRY SYSTEMOWE | |
| Zasięg detekcji | 450m przy współczynniku odbicia 50% i 0 klx 250m przy współczynniku odbicia 10% i 100 klx |
| Zakres próbkowania chmury punktów | Pojedynczy powrót wiązki: max. 240,000 pts/s Wielokrotny powrót wiązki: max. 1,200,000 pts/s |
| Dokładność systemu | Poziomo: 5 cm @ 150 m Pionowo: 4 cm @ 150 m |
| Przypisywanie kolorów chmury punktów | Współczynnik odbicia, wysokość, odległość, RGB |
| LiDAR | |
| Dokładność pomiaru (RMS 1σ) | 2 cm @ 150 m |
| Maksymalna ilość powrotów wiązki lasera | 5 |
| Tryby skanowania | Bez powtórzeń (Non-repetitive), Liniowy (Repetitive) |
| FOV | Tryb skanowania liniowego (repetitive): Poziomo 70°, Pionowo 3° Tryb skanowania bez powtórzeń (non-repetitive): Poziomo 70°, Pionowo 75° |
| Minimalny zasięg detekcji | 3 m |
| Dywergencja wiązki laserowej | Poziomo 0.2 mrad, Pionowo 0.6 mrad |
| Długość fali wiązki lasera | 905 nm |
| Rozmiar plamki lasera | Poziomo 4 cm, Pionowo 12 cm @ 100 m (FWHM) |
| Częstotliwość emisji impulsu lasera | 240 kHz |
| Poziom bezpieczeństwa lasera | Class 1 (IEC 60825-1:2014) |
| Dopuszczalny limit emisji (AEL) | 233.59 nJ |
| Referencyjna wartość otwarcia przysłony | Efektywna przysłona: 23.85 mm (odpowiednik okręgu) |
| Maksymalna moc emisji impulsu laserowego w ciągu 5 nanosekund | 46.718 W |
| INERCYJNY SYSTEM NAWIGACYJNY | |
| Częstotliwość aktualizacji IMU | 200 Hz |
| Zakres wskazań akcelerometru | ±6 g |
| Zakres wskazań czujnika prędkości kątowej | ±300 dps |
| Dokładność w osi Yaw (RMS 1σ) | W czasie rzeczywistym: 0.2°, W przetwarzaniu końcowym: 0.05° |
| Dokładność w osi Pitch/Roll (RMS 1σ) | W czasie rzeczywistym: 0.05°, W przetwarzaniu końcowym: 0.025° |
| Dokładność pozycjonowania w poziomie | RTK FIX: 1 cm + 1 ppm |
| Dokładność pozycjonowania w pionie | RTK FIX: 1.5 cm + 1 ppm |
| KAMERA MAPUJĄCA RGB | |
| Sensor | 4/3 CMOS, Efektywna liczba pikseli: 20 MP |
| Obiektyw | FOV: 84° Ekwiwalent formatu: 24 mm Przysłona: f/2.8-f/11 Odległość ogniskowania: 1 m to ∞ (z autofocusem) |
| Czas otwarcia migawki | Mechaniczna migawka: 2-1/2000 s Elektroniczna migawka: 2-1/8000 s |
| Ilość cykli pracy przysłony | 200000 |
| Rozmiar zdjęcia | 5280×3956 (4:3) |
| Tryby wykonywania zdjęć | Pojedyncze zdjęcie: 20 MP Samowyzwalacz: 20 MP JPEG interwał czasowy: 0.7/1/2/3/5/7/10/15/20/30/60 s RAW/JPEG + RAW interwał czasowy: 2/3/5/7/10/15/20/30/60 s |
| Kodek i rozdzielczość wideo | H.264 4K: 3840×2160@30fps FHD: 1920×1080 @30fps |
| ISO | Wideo: 100-6400 Zdjęcie: 100-6400 |
| Szybkość transmisji wideo (bitrate) | 4K: 85Mbps FHD: 30 Mbps |
| Obsługiwany system plików | exFAT |
| Format zdjęć | JPEG/DNG (RAW) |
| Format wideo | MP4 (MPEG-4 AVC/H.264) |
| GIMBAL | |
| System stabilizacji | 3-osiowy (tilt, roll, pan) |
| Zakres wibracji kątowych | 0.01° |
| Mocowanie | Odłączany DJI SKYPORT |
| Zakres mechaniczny | Oś Tilt: -143° do +43° Oś Pan: ±105° |
| Dostępny zakres kontroli | Oś Tilt: -120° do +30° Oś Pan: ±90° |
| Tryb pracy | Follow/Free/Re-center |
| PRZECHOWYWANIE DANYCH | |
| Przechowywanie surowych danych | Zdjęcie/IMU/Chmura punktów/GNSS/Pliki kalibracyjne |
| Przechowywanie danych chmury punktów | Przechowywanie danych modelowania w czasie rzeczywistym |
| Obsługiwane kary pamięci microSD | microSD: Prędkość zapisu sekwencyjnego 50 MB/s lub wyższa i klasa szybkości UHS-I Speed Grade 3 lub wyższa; Maksymalna pojemność: 256 GB. Należy używać zalecanych kart microSD. |
| Zalecane karty pamięci microSD | Lexar 1066x 64GB U3 A2 V30 microSDXC Lexar 1066x 128GB U3 A2 V30 microSDXC Kingston Canvas Go! Plus 128GB U3 A2 V30 microSDXC Lexar 1066x 256GB U3 A2 V30 microSDXC |
| PRZETWARZANIE KOŃCOWE | |
| Sugerowane oprogramowanie | DJI Terra |
| Format danych | DJI Terra obsługuje eksportowanie modeli chmur punktów w następujących formatach: PNTS/LAS/PLY/PCD/S3MB |
 Skorzystaj z rady ekspertów
Skorzystaj z rady ekspertów